As the current home reno project is a kitchen rebuild (walls added and removed, nothing left behind – it’s dramatically more than a remodel) the first step followed was to acquire all the appliances (constructing the kitchen and then finding the oven that you’ve got a very specific sized hole made for is “no longer available” would be… disappointing).
One of the acquisitions was two Viali VCCG90SS rangehood extractor units, one for each cooktop. Noise during operation, rated capacity and acquisition cost all seem acceptable. The instruction manual seems, at first glance, fabulous: large, clear font, line drawings giving unit dimensions, step-by-step installation images and all in a matte A4-sized, easy-to-read format.
When you actually read the instruction manual with the intent of following the instructions for installation, that’s when you run into some difficulties. Let’s be clear: I’ve installed a couple of ducted extractor fans in the past, so rangehoods are not some unknown quantity for me. This is not my first rodeo. I consider myself handy, I’ve installed kitchens from the ground up. I’ve spent quite some time puzzling over this booklet, I’ve searched the Interwebs, I’ve really battled with this.
I will now try to explain how the heck you’re meant to install this Viali rangehood, because the shipped instructions sure don’t. Perhaps I’ll do it via annotation. Continue reading →
I recently found myself without a remote for my WDTV Live media player, and limited resources to do anything about it – but I did have an Arduino, a breadboard and the local Jaycar had an IR LED. Controlling IR devices is common practice with an Arduino. I would even be able to hack in functions that didn’t exist on the manufacturer’s remote – like creating a three minute skip by switching to 16x speed for 12 seconds.
The first port of call was to obtain Ken Shirriff’s Arduino IR remote control protocol library – as opposed to communications protocols, of which there are quite a number; did you know the first cut of WiFi included an infrared version? Without the remote, I wasn’t able to record and playback the IR signals sent to the WDTVLive, as you would with a learning remote. I had to find what to transmit from my custom remote. I little googling and I found the WD TV Live infrared remote control codes, which also helpfully reveals that the protocol is NEC.
I knocked up a quick proof of concept, installed it and watched it not work. Given I can’t see in infrared, I didn’t know if my circuit was working. I hooked a red LED up in parallel, and it didn’t light up; I thought I had cathode and anode swapped around, so flipped the red LED – and it didn’t light up. I pulled the IR LED, and then the red LED worked… I was shorting out the red LED. I couldn’t – with the bits I had lying around – confirm the device was transmitting anything. Rather than put the LEDs in series, I got a cheap camera-phone with video function, and it could see IR just fine. And it turns out the IR LED was transmitting something, but the WD TV Live media player wasn’t listening. Why?
The NEC infrared control protocol transmits 32 bits in one of two formats, one old (as in elderly) format encodes for 256 devices with 256 commands each, and the other encodes for ~64K devices with 256 commands each. The first 16 bits encode the device, and the second 16 bits encode the command. 16 bits for one of 256 commands, you ask? Well, one byte of the second 16 bits is the command, and the other is – for error checking purposes – the one’s complement of that. Further details of the pulse timing and protocol contents are available in variousplaces, but they neglect to mention the extended addressing format. There are many IR control protocols. To use Ken’s IR library you need to know which protocol is used (which the google search revealed), and you can determine the protocol from the timing data found in the LIRC definition of a protocol, in this case the LIRC infrared control protocol for WDTV Live media player remote. The LIRC protocol defintion format is described by WinLIRC, so you can see what the timings are. In this case, the NEC protocol is revealed by the header, one and zero definitions, along with the fact that each code has 16 bits of ‘pre-data’ and 16 bits of data (a 32 bit package). Everything I could see was showing that the two, separately arrived at sets of command codes that were empirically sampled from the real world were compliant with the spec. One of the things the spec taught me was to transmit the NEC code twice, and to wait 70ms between re-transmissions.
I wasted time finding other codes for the remote, in other formats; I checked for byte ordering issues. Nothing worked.
The actual problem was the unsigned long for the command was previously an int; failing to notice this simple error led me to spend a long time trying to figure out why nothing was happening when I transmitted a command. One of the problems with the C language is the guarantees about data sizes aren’t worth much. My entire life has been spent programming on architectures that have 32 bit data words; C compilers on these machines have all defined an int as 32 bits, but I’ve always been aware that the language spec says that an int is at least as wide as a short, which is at least as wide as a char with actual widths being up to the compiler implementation (although why you’d have different words for things of the same size is beyond me). The AVR microcontroller in question has an 8 bit word; mathematical operands typically yield an 8 bit result (multiply is an exception) with compilers needing to implement more instructions to yield greater data widths. The defines express the codes as four byte values, which were then wrangled into a two byte int, and then again into unsigned four byte integer when passed to the IR library. Truncated bits in a protocol like this were the cause of inactivity.
Even with this fundamental problem solved, confusion was added by the fact that one of the memory cells in my Arduino is faulty. Once IR control code transmission was working, I noticed that sometimes it didn’t work. I decided to echo the command to the serial port, and the command being transmitted didn’t match that for the key pressed – the second byte was wrong. I added code to work around this memory corruption (not shown in the code below, because this is a pretty unusual). I’ve never come across this kind of problem before, recognising and then solving something like that is pretty old-school.
/*
Pin 3 is hard-wired into the IR library as the emitter
*/
#include <IRremote.h>
//#define DEBUG
IRsend irsend;
#define btn_enter 0x219E10EF
#define btn_right 0x219E906F
#define btn_left 0x219EE01F
#define btn_down 0x219E00FF
#define btn_up 0x219EA05F
#define btn_option 0x219E58A7
#define btn_back 0x219ED827
#define btn_stop 0x219E20DF
#define btn_rew 0x219EF807
#define btn_ff 0x219E7887
#define btn_play 0x219E50AF
#define btn_prev 0x219E40BF
#define btn_next 0x219E807F
#define btn_eject 0x219E08F7
#define btn_search 0x219EF00F
#define btn_home 0x219E609F
#define btn_power 0x219E48B7
// Pin 13 has an LED connected on most Arduino boards.
// give it a name:
const int onboard_led = 13;
const int retransmit=2;
unsigned long play_after=0;
void setup()
{
pinMode(3, OUTPUT);
pinMode(onboard_led, OUTPUT);
Serial.begin(9600);
Serial.println("WDTV Live serial controlled IR remote");
Serial.println("~ Power Eject ^ & Search Rew - + FF");
Serial.println(" w Back q e Enter Play P");
Serial.println("a s d (Arrows) x Stop Last < > Next");
Serial.println("3 - FastForward three minutes");
}
void loop() {
unsigned long cmd=0;
if (Serial.available()) {
switch (Serial.read()) {
case 'E':
case 'e':
case ')':
case '0':
case 'O':
case 'o': cmd=btn_enter; break;
case 'q':
case 'Q': cmd=btn_back; break;
case 'P':
case 'p':
case ' ': cmd=btn_play; break;
case 'S':
case 's': cmd=btn_down; break;
case 'W':
case 'w': cmd=btn_up; break;
case 'A':
case 'a': cmd=btn_left; break;
case 'D':
case 'd': cmd=btn_right; break;
case '-':
case '_': cmd=btn_rew; break;
case '=':
case '+': cmd=btn_ff; break;
case ',':
case '< ': cmd=btn_prev; break;
case '.':
case '>': cmd=btn_next; break;
case '/':
case '?': cmd=btn_option; break;
case '~': cmd=btn_power; break;
case '!':
case '1': cmd=btn_home; break;
case '^':
case '6': cmd=btn_eject; break;
case '*':
case '8': cmd=btn_search; break;
case 'x':
case 'X': cmd=btn_stop; break;
case '3':
if (!play_after) play_after=4; break;
}
}
if (play_after > 0) {
if (cmd) {
play_after=0;
}
else if (play_after > 5) {
if (play_after < millis()) {
cmd=btn_play;
play_after=0;
}
}
else {
cmd=btn_ff;
if (--play_after == 0) {
play_after=millis()+12000;
}
}
}
if (cmd) {
digitalWrite(onboard_led, HIGH); // turn the LED on to indicate activity
for (int i = 0; i < retransmit; i++) {
irsend.sendNEC(cmd, 32);
delay(70);
}
#ifdef DEBUG
Serial.println(cmd, HEX);
#endif
digitalWrite(onboard_led, LOW); // turn the LED off - we're done transmitting
}
}
I have a desire to control some DC electric motors using a microcontroller. Under the covers these are normally H-Bridges, so that the motor can run in both directions. I also require that the motors be able to undriven – to freewheel without electric braking.
The cheapest motor controllers will only deliver 800ma (per motor), which might be enough, but possibly isn’t. I think the L9110 datasheet (also known as the HG7881) hints at a peak of 2amp, but my Chinese is insufficient. There is no information on the switching frequency. These controllers drive the motors in either direction, or brake – but they will not disable the motors.
The next cheapest drivers are based on the L298 motor controller chip. The parts number variants indicate the packaging type; L298N is the vertical version, and a L298P is surface mount – which I can’t get my head around, how are you meant to dissipate the heat with a surface mount version? Anyways, the L298 can switch at up to 20KHz according to the L298 motor controller datasheet, and delivers a total of 4A, 2 amp to each channel, and a total of 25W maximum, presumably about 12.5 watts per channel. I’m looking at motors of around 6V, so the maximum wattage isn’t a consideration, but I’d have to start thinking about the power limits if they were 12V motors. I’ll need to supply more than six volts because the L298 module sucks up 0.7V doing its business. Even the cheapest modules using this chip expose the enable line for each motor, and they include a jumper to permanently enable (which I don’t want, but that’s just a matter of removing the jumper from the enable pin); more expensive modules expose the current sensing pins on the L298 (which I don’t think I have a use for). This unusual one is a l298 with a connector for stepper motor. Solabotics has an informative (if poorly spelled) L298 instruction sheet with examples hanging off their product page.
If I could switch at 30KHz, that’s beyond human hearing and thus “silent”, but beyond these two controllers there’s not a lot of commonly available choice, so I’m going with the ever-so-slightly more expensive and actually lets-me-do-what-I-want choice.
Higher frequencies seem to require MOSFET technology, which means dollars – and it seems higher voltages for the motors, which means more expensive motors, and more unusual power supplies (more cost). I recall that higher switching frequencies lead higher efficiency. Oh well.
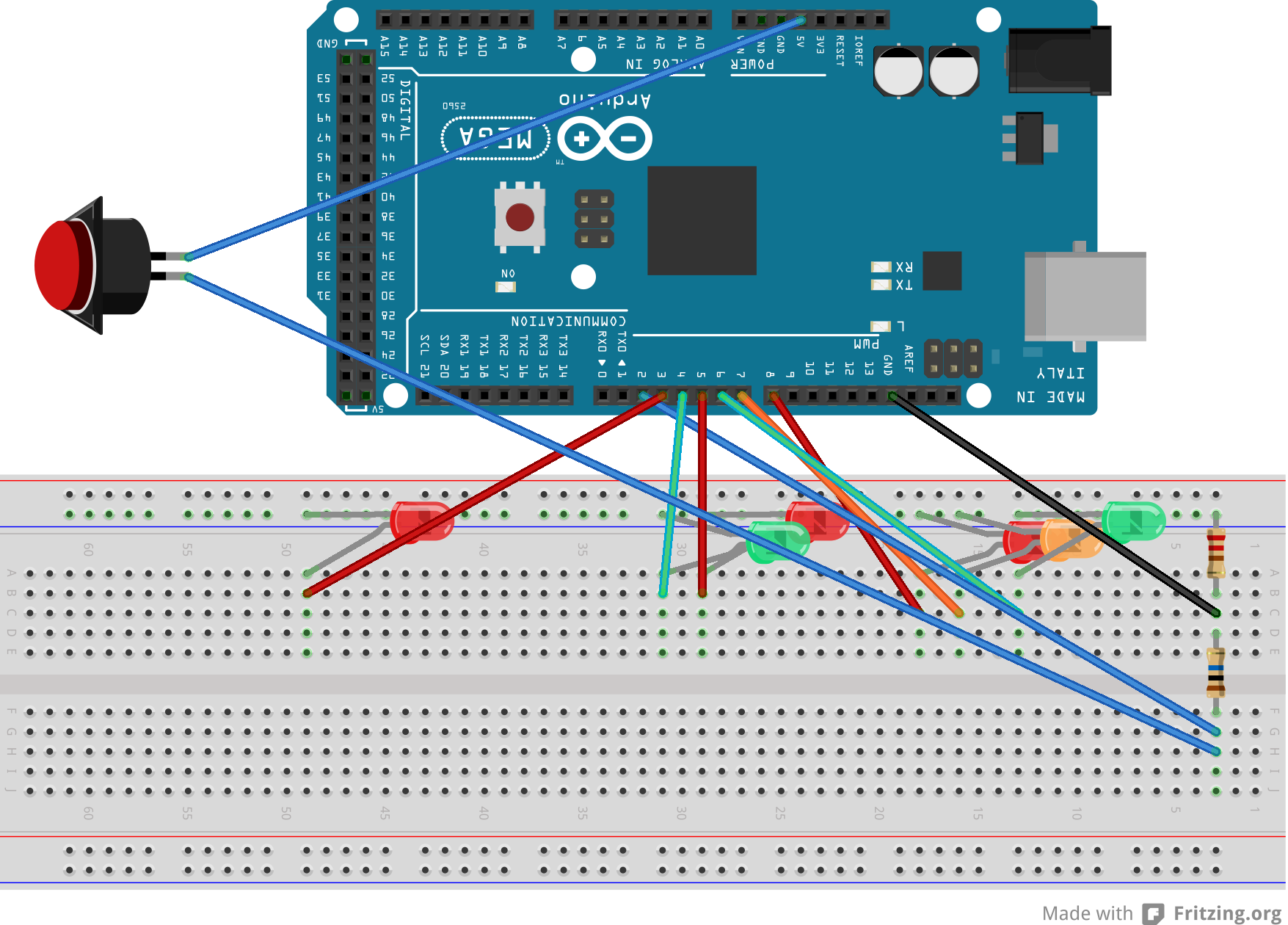
This video shows the Traffic light and pedestrian crossing I’ve implemented with an Arduino. It’s a reproduction of the crossing near my home, timings taken from a video of it.
Incidentally, I produced the diagrams for this using a product called Fritzing. It’s a nifty piece of software that allows you to draw a breadboarded version of your circuit, lay out the circuit schematic and then automatically design the artwork for a etched circuitboard. I haven’t experienced the latter, because of an autoroute bug in version 0.8 of Fritzing.
I exported the images as SVGs from Fritzing and discovered that WordPress won’t allow them to be uploaded because of security issues; presumably the ability to include JavaScript inside a SVG for animation (etc). So then I exported as PNG, the lossless format. One of the two images wouldn’t upload, but was acceptable to WordPress after scaling down. I started out publishing on the web using notepad and FTP, and look where I am now.
Hardware
I’ve been using an Arduino Mega2560 as the development environment but I’m targeting something smaller for implementation. The code compiles (on the bulky Mega instruction set) to 3.5Kb, so I’m satisfied that as things stand I’m not going to blow any memory budget.
The LED lights all share a single 220 ohm current-limiting resistor, and the call button is pulled low with a 47K ohm resistor to prevent the input pin from floating all over the shop when the button isn’t pressed.
You may notice that the video doesn’t exactly match the diagram. That’s because it’s built out of bits and bobs I had lying around. The ~200-ish Ohm resister had leads that wouldn’t insert into the breadboard. Thus, alligator clips all over the place.
Software
The light cycle is handled with a state machine; the flashing of lights is effected via state changes. The state machine is triggered by interrupts; the ISRs (Interrupt Service Routines) are lightweight, with the “heavyweight” processing for the state machine occurring in response to changes made in the ISRs. To minimise the processing load in the buttonpress ISR a test has been cached in a variable. The timer ticks over every half second, giving the state machine a half-second resolution – which seems to match what happens in the real world.
The state machine is initialized into a safe state of having the traffic face a red light, and the pedestrians facing the flashing red man. That means if the system restarts in the middle of a crossing cycle, no one gets killed.
Although the timer is fired via an interrupt, it won’t fire during a delay() so the delay in the main loop is very short.
Although the environment gives an opportunity to develop an OOP solution, their wasn’t any clear need for that level of abstraction, and microcontrollers tend to feel the additional cost of indirection. For example, accesses to members of the state were costly in terms of instructions and lead me to consider using multiple single dimension arrays, accessed by pointer.
#include <TimerOne.h>
//#define DEBUG
/*
Simulate a pedestrian crossing
An Australian pedestrian crossing has three traffic control lights,
two pedestrian control lights and a light to acknowledge "call requests"
(i.e. pressing the crossing button).
The traffic control lights cycle red -> green -> amber, solid in all.
The pedestrian control lights cycle red -> green -> flashing red.
The crossing button lights up the call request light, which stays lit
until the pedestrian control light turns green.
Once the traffic control light turns green, it stays that way for some time
before it will yield to a call request. This is to ensure the road is not
continuously blocked servicing pedestrian crossing needs.
This code responds to two events: the passage of time and the pressing of
the call request button. Outside of responding to these events the program
has no secondary task. To optimize the performance of the CPU in its
secondary task, the primary tasks occur in response to interrupts.
*/
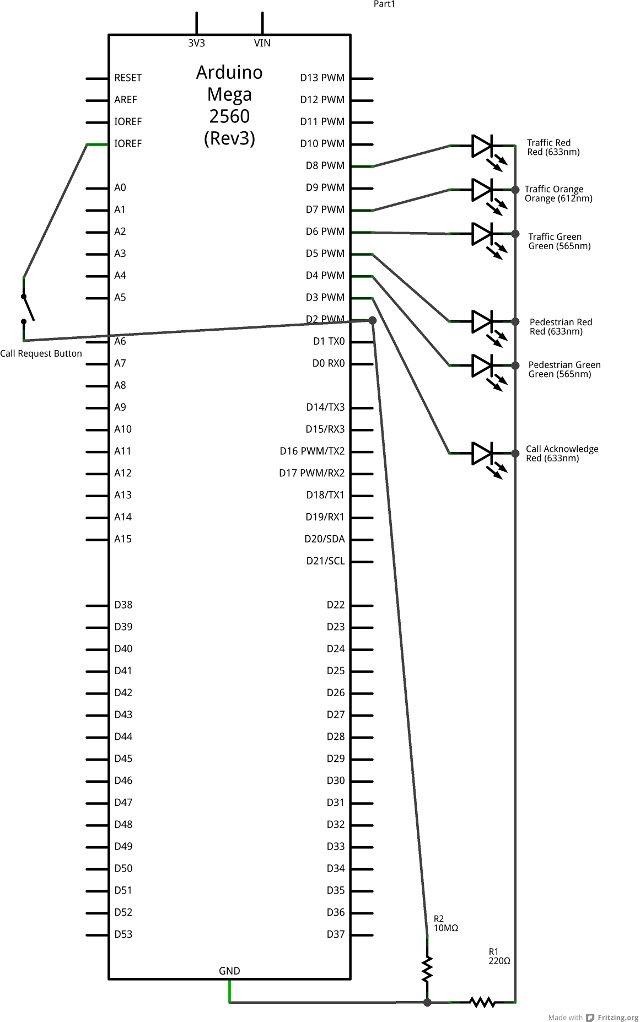
// Pin allocation:
const int CallbuttonPin = 2; // the "I want to cross" button
const int lightCallAcknowledge = 3; // the light that says "you pressed the button"
const int lightGreenMan = 4; // Pedestrian "walk now"
const int lightRedMan = 5; // Pedestrian "Do not start walking"
const int lightGreen = 6; // Traffic go
const int lightAmber = 7; // Traffic stop if safe
const int lightRed = 8; // Traffic stop
const int timerPin1 = 9; // lost to timing, can't be used for IO
const int timerPin2 =10; // lost to timing, can't be used for IO
const int onBoardLED = 13; // on board, can be over-ridden or even cut
typedef struct {
public:
byte timer_length; // How long to stay in this state (1 tick = 500ms)
byte action; // state to set the lights to
char next_state_on_timer;
char next_state_on_call_button;
} StateTransition;
const int bitClearCallButton = B00000100; // Clear call acknowledge
const int bitGreenMan = B10001000; // "walk now"
const int bitRedMan = B00010000; // "Do not start walking"
const int bitGreen = B00110000; // Traffic go
const int bitAmber = B01000000; // Traffic stop if safe
const int bitRed = B10000000; // Traffic stop
const int maskControlLights =
bitGreenMan | bitRedMan | bitGreen | bitAmber | bitRed;
const char NoTransition = -1;
const StateTransition state[] = {
{8, bitAmber|bitRedMan, 1, NoTransition}, // Amber and Red Man (4 seconds)
{4, bitRed|bitRedMan, 2, NoTransition}, // Red and Red Man (2 seconds)
// Red light lasts for 28 seconds total - 56 ticks
{21, bitRed|bitGreenMan|bitClearCallButton,
3, NoTransition}, // Red and Cross
// 7.5 Seconds of flashing red man
{1, bitRed|bitRedMan, 4, NoTransition}, // Red and Flashing Red Man
{1, bitRed, 5, NoTransition}, // Red and Flashing Red Man
{1, bitRed|bitRedMan, 6, NoTransition},
{1, bitRed, 7, NoTransition}, // 2s
{1, bitRed|bitRedMan, 8, NoTransition},
{1, bitRed, 9, NoTransition}, // 3s
{1, bitRed|bitRedMan, 10, NoTransition},
{1, bitRed, 11, NoTransition}, // 4s
{1, bitRed|bitRedMan, 12, NoTransition},
{1, bitRed, 13, NoTransition}, // 5s
{1, bitRed|bitRedMan, 14, NoTransition},
{1, bitRed, 15, NoTransition}, // 6s
{1, bitRed|bitRedMan, 16, NoTransition},
{1, bitRed, 17, NoTransition}, // 7s
{1, bitRed|bitRedMan, 18, NoTransition},
{1, bitRed, 19, NoTransition}, // 8s
{9, bitRed|bitRedMan, 20, NoTransition}, // Red and Red Man
// Allow at least 25.5 seconds of traffic through
{51, bitGreen|bitRedMan, 21, NoTransition}, // Green and Red Man
{99, bitGreen|bitRedMan, NoTransition, 0}, // Green and Red Man // Loop if button pressed
{1, bitRed|bitRedMan, 3, 3}, // initial state
};
volatile char current_state = 16;
volatile char next_state = 3; // Start in a safe state:
volatile byte ticks_remaining = 1;
boolean call_button_disabled = true;
void transition_to_next_state()
{
#ifdef DEBUG
Serial.print((int)current_state);
Serial.print(" transitions_to ");
Serial.println((int)next_state);
#endif
if (next_state == NoTransition) return;
current_state = next_state;
next_state = NoTransition;
// turn on the lights as per this state
byte mask = B00001000;
byte light=lightGreenMan;
while (light < = lightRed)
{
#ifdef DEBUG
Serial.print("light pin ");
Serial.print(light);
#endif
if (state[current_state].action & mask)
{
digitalWrite(light, HIGH); // turn on the signal
#ifdef DEBUG
Serial.println(" HIGH");
#endif
}
else
{
digitalWrite(light, LOW); // turn off the signal
#ifdef DEBUG
Serial.println(" LOW");
#endif
}
light++;
mask = mask << 1;
}
// Turn off the call acknowledge light if that's something we do
call_button_disabled = state[current_state].action & bitClearCallButton;
if (call_button_disabled)
{
#ifdef DEBUG
Serial.println("CallButtonDisabled()");
#endif
digitalWrite(lightCallAcknowledge, LOW); // turn off the signal
}
// start the timer until the next state
ticks_remaining = state[current_state].timer_length;
}
void timer_tick()
{
if (--ticks_remaining == 0)
{
next_state = state[current_state].next_state_on_timer;
}
// See if we can service any existing call
else if (digitalRead(lightCallAcknowledge))
{
next_state = state[current_state].next_state_on_call_button;
}
}
void call_button_pressed()
{
// Don't acknowledge if it would be cleared
if (!call_button_disabled)
{
digitalWrite(lightCallAcknowledge, HIGH); // Acknowledge the request
}
}
// the setup routine runs once when you press reset:
void setup() {
#ifdef DEBUG
Serial.begin(9600);
Serial.println("Traffic light simulation");
#endif
pinMode(CallbuttonPin, INPUT);
pinMode(lightCallAcknowledge, OUTPUT);
pinMode(lightGreenMan, OUTPUT);
pinMode(lightRedMan, OUTPUT);
pinMode(lightGreen, OUTPUT);
pinMode(lightAmber, OUTPUT);
pinMode(lightRed, OUTPUT);
Timer1.initialize(500000); // initialize timer1, and set a 1/2 second period
Timer1.attachInterrupt(timer_tick); // attaches callback() as a timer overflow interrupt
attachInterrupt(0, call_button_pressed, CHANGE);
}
// the loop routine runs over and over again forever:
void loop() {
if (next_state!=NoTransition)
{
transition_to_next_state();
}
delay(50);
}
The module Keyes_SR1y is the KY-019 5V relay module for Arduino (or most anything else really, it’s not as if it plugs straight into the board – you’ve got to connect the pins off to disparate parts of the Arduino board). Relays mostly are used to switch larger loads than opto-isolated switches; they’re generally used in cars or for switching household devices on and off. Large currents are dangerous; you have been warned. This module can switch 250V at 10 amp – at least, that’s what the printing on the box says. The 5 volt part is about the voltage needed to switch the relay. I haven’t measured the current used to switch, but it runs happily off the current supplied by a laptop USB port.
The circuit board marks the 5 volt (+) and ground (-) lines (because of the current draw, these are fed from the power circuitry of the Arduino, rather than the GPIO pins); the remaining line is a digital input; the program code or “sketch” to control it looks something like
const int relayPin=5;
pinMode(relayPin, OUTPUT);
digitalWrite(relayPin, HIGH);
assuming you’ve hooked the relay up to pin 5. Split the code into the body, setup(), loop() and elsewhere as appropriate.
HIGH energizes the relay (switches it from its normal state), LOW does the opposite (and switches it into its normal state). When it changes state it makes an audible click. On board the module is a red LED that lights up when the relay is energized. The relay has Normally Open (NO) and Normally Closed (NC) circuits, so save some power and use the appropriate one for the normal state, or design for a useful fail-safe state.
It’s hard rubbish here at the moment, and having just had a power supply fail on me leaving me with no spares, I thought I’d go scavenging. PC components are mostly interchangeable, I’ll just grab a handful of computers and pull the bits I need, and toss the rest out with the hard rubbish.
But someone’s taken them all.
Not only they, they’re cutting the cords off any CRTs lying around. I suspect scrap-metal hounds (copper in the power and video leads), but I can’t be certain because there seems to be a lot of steel things that weren’t snaffled.
Who’s taking the old computers, and why? Also: how do I lay my hands on a power supply – don’t tell me I’ve actually got to buy one!
Making stuff is fun. But sometimes you need a 3D printer, and Bunnings are out of them – besides, they’re thousands of bucks. What to do?
There’s a place in the USA called TechShop which is a workshop fully fitted out with most imaginable tools, industrial grade. I lust after it. $30 for a day-pass, $100 for a month. Only problem is, cool ideas like this don’t seem to get financial traction. If something like this opens up in your area, make sure they’re going to hang around before you part with long-term payments.
Parallels have been drawn to the MIT FabLab, which is in a number of countries, but seems more focused on technology than materials.
For the story so far see Part 1 and Part 2. If you’re totally bored, then please don’t read on… this is the longest post yet!
So I got my Linksys NSLU2 home. I thought I’d fire it up and make sure it worked. There’d be nothing more frustrating than flashing it with the Linux OS, find it doesn’t work and then wonder whether the issue is with the new Firmware or the actual hardware.
Plugged it in, fired it up, plugged in and formatted a blank external drive I dug out of the cupboard. All good so far! I can’t plug in a disk with anything on it because the LinkSys requires disks to be formatted with EXT3.
Hmmm… what’s this… a firmware upgrade to the NSLU2 that allows it to read NTFS! That’d make the device usable until I get my head around the Linux options!
Loaded up the upgrade, all went smoothly. Plugged in my external hard drive to see if it works. Get “Drive not formatted” message in the NSLU2 admin screen, so it must not support NTFS after all. Oh well. Plugged the external drive back into my desktop PC.
“This disk is not formatted. Do you want to format it now? Yes/No”
My
heart
stopped.
An entire disk’s worth of data… gone. Video from when the kids were little, lots of photos… gone. I know what you’re all thinking… why wasn’t this data backed up? I have two responses to this. 1) It’s not that easy to back up a 14GB video file. 2) Part of the reason I was setting up this solution is to make automated backups more accessible!
Some have said that I shouldn’t have trusted the device with my data, but in my defence, it’s a shrink wrapped consumer device that’s designed to have drives plugged in to it. If I can’t trust this device with my data, I don’t have much use for it!
I kicked off a File Recovery scan and went to bed very sad.
In the morning, the file recovery had found a bunch of deleted files, but none of the files that were not deleted at the time of the corruption! I tried loading the drive up in a couple of EXT3 file viewers, but they couldn’t read the drive either.
I’d pretty much given up hope of getting my data back.
Then my neighbour nonchalantly suggests I try a partition table repair tool. I load one up and run it. It tells me “The partition table on the disk is incorrect. Would you like to fix it?” I click “Yes”. Bang. All my data is back!!!
Yay! Waves of relief! Not to mention proof that the Linksys had screwed up the disk. The partition table was written for an EXT3 disk, even though it was still formatted in NTFS.
Yesterday I took the Linksys back to Harris Technology and threw it at them as hard as I could. Actually I didn’t and they were incredibly helpful, giving me a full refund without any hassle.
So back to the drawing board. Now that I realise how precious that data is to me, I’m going to have to get a proper, RAID based network drive solution. More money 🙁 I’ll probably go for a ThecusN2100.
Lesson the First
Imagine losing all your data that is not backed up. How do you feel about that?
Lesson the Second
No, really. Losing it. Right now. Seriously, how do you feel about that?
Weigh your reaction to the above questions against the cost of getting dedicated backup.
Here endeth the lesson.
Update: I was talking to Josh last night and he said it wasn’t clear that I hadn’t installed the funky open source firmware on the LinkSys box yet. It was running the latest official firmware release. I probably also didn’t emphasize enough that I wouldn’t recommend anyone buying one of these pieces of junk
Now I want to make some modifications. The issue is that there are a number of different firmware options to choose from.
My requirements:
– Serve files for media (Basic functionality for all firmware)
– Read from FAT32 formatted external drives (isn’t provided by the base firmware!! The device requires all disks to be formatted!)
– Bittorent client
– Subversion server
Based on this comparison of different firmware options I’m going to have to look at a full linux based OS. Unfortunately I’ve never used Linux, so trying to get it to work on a small memory/slow processor device is going to be a steep learning curve.
I’ve annexed a room at my house to be my ‘den’. First order of business is getting some entertainment in there.
Requirements:
Watch DVDs
Watch other media from my computer
Reasonably inexpensive
My current solutions contains the following components:
Xbox running XBMC as a games/media streaming console (just purchased from Global Consoles)
Some sort of network storage so I don’t need to have my PC running constantly.
The network storage decision is narrowing down. I considered solutions such as the Thecus N1200. I dismissed this as being overpriced and probably overkill for my needs.
My current front runner is a Linksys NSLU2. It doesn’t have any internal disks, but has two USB ports to plug in external drives. The real beauty of the device (affectionately known as the ‘slug’ by fanboyz) is that there is an open source Linux based operating system that can be installed to it. This adds lots of extra functionality like all sorts of servers (print, bittorrent, iTunes, media/photos). I was even thinking I could install svn on it and it can be my source control repository.
I’ll let you know how my plans proceed. Any advice/comments would be very welcome!
Geoff has built a Homemade Air Conditioner – by running ice water (made from ice-cubes, and bottles of water he’s frozen in his freezer) through copper tubing at the back of a stand fan – fluid motion provided via capillary action.
Once the water runs out, the house has cooled off enough that the fan alone provides sufficient cooling.
That would be evaporative cooling, Geoff.
Geoff also suggests adding salt to your mix, because
this will drop the freezing point of the water and increase the cooling effect of the fan.
Uh, no. That would be lowering the freezing point of the water. It doesn’t lower the temperature of the water, it means that it takes more energy to freeze the water in the first place. But you’re already dumping frozen water into your water bucket, so you’re too late.
Geoff apparently had to “poke a little hole” through his flywire for the exhaust of his water tube, but draws the line at digging up his landlord’s garden to make a geothermal cooling system. I’m glad for his landlord, but what’s the problem with digging up a backyard only to cover it up again? A hole in your flywire is there for good!
Geoff goes on to suggest that if you hang a car radiator off your fan – in a bid to increase the efficiency of the system – you might want to check it can handle the weight.
Full, step-by-step instructions (with pcitures) on building your own cheap and easy Digital Picture Frame. Answering an unasked question on the selection of componentry, the author says:
Why a toggle switch? Because toggle switches rule, that’s why. We don’t want no puny sliding power switches. Oh no, this power switch is 25 percent functional, 75 percent hardcore awesome.
But why do this? You can buy one for a few hundred bucks. I guess it’s just the whole DIY thing, isn’t it? I guess you’re also recycling unloved tech into totally hardcore awesome tech.